5. pgRouting Algorithms¶
pgRouting was first called pgDijkstra, because it implemented only shortest path search with Dijkstra algorithm. Later other functions were added and the library was renamed.
This chapter will explain selected pgRouting algorithms and which attributes are required.
Note
If you run osm2pgrouting tool to import OpenStreetMap data, the ways table contains all attributes already to run all shortest path functions. The ways table of the pgrouting-workshop database of the previous chapter is missing several attributes instead, which are listed as Prerequisites in this chapter.
5.1. Shortest Path Dijkstra¶
Dijkstra algorithm was the first algorithm implemented in pgRouting. It doesn’t require other attributes than source and target ID, id attribute and cost. It can distinguish between directed and undirected graphs. You can specify if your network has reverse cost or not.
Prerequisites
To be able to use reverse cost you need to add an additional cost column. We can set reverse cost as length.
ALTER TABLE ways ADD COLUMN reverse_cost double precision;
UPDATE ways SET reverse_cost = length;
Description
Returns a set of pgr_costResult (seq, id1, id2, cost) rows, that make up a path.
pgr_costResult[] pgr_dijkstra(text sql, integer source, integer target, boolean directed, boolean has_rcost);
Parameters
| sql: | a SQL query, which should return a set of rows with the following columns: SELECT id, source, target, cost [,reverse_cost] FROM edge_table
|
||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| source: | int4 id of the start point |
||||||||||
| target: | int4 id of the end point |
||||||||||
| directed: | true if the graph is directed |
||||||||||
| has_rcost: | if true, the reverse_cost column of the SQL generated set of rows will be used for the cost of the traversal of the edge in the opposite direction. |
Returns set of pgr_costResult:
| seq: | row sequence |
|---|---|
| id1: | node ID |
| id2: | edge ID (-1 for the last row) |
| cost: | cost to traverse from id1 using id2 |
Note
- Many pgRouting functions have sql::text as one of their arguments. While this may look confusing at first, it makes the functions very flexible as the user can pass any SELECT statement as function argument as long as the returned result contains the required number of attributes and the correct attribute names.
- Dijkstra algorithm does not require the network geometry.
- The function does not return a geometry, but only an ordered list of nodes.
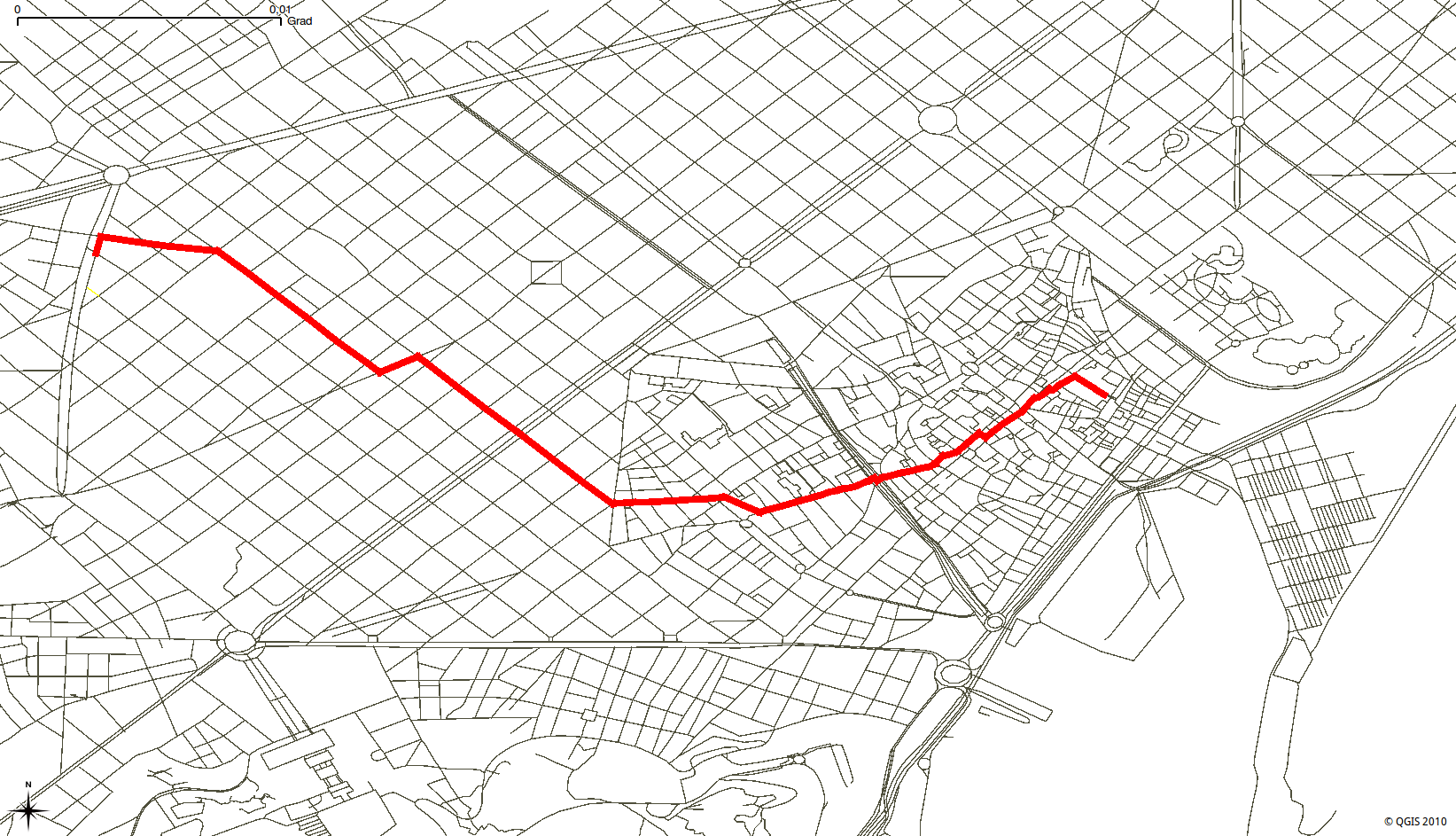
Example query
pgr_costResult is a common result type used by several pgRouting functions. In the case of pgr_dijkstra the first column is a sequential ID, followed by node ID, edge ID and cost to pass this edge.
SELECT seq, id1 AS node, id2 AS edge, cost FROM pgr_dijkstra('
SELECT gid AS id,
source::integer,
target::integer,
length::double precision AS cost
FROM ways',
30, 60, false, false);
Query result
seq | node | edge | cost
-----+------+------+---------------------
0 | 30 | 53 | 0.0591267653820616
1 | 44 | 52 | 0.0665408320949312
2 | 14 | 15 | 0.0809556879332114
...
6 | 10 | 6869 | 0.0164274192597773
7 | 59 | 72 | 0.0109385169537801
8 | 60 | -1 | 0
(9 rows)
Note
- With more complex SQL statements, using JOINs for example, the result may be in a wrong order. In that case ORDER BY seq will ensure that the path is in the right order again.
- The returned cost attribute represents the cost specified in the sql::text argument. In this example cost is length in unit “kilometers”. Cost may be time, distance or any combination of both or any other attributes or a custom formula.
5.2. Shortest Path A*¶
A-Star algorithm is another well-known routing algorithm. It adds geographical information to source and target of each network link. This enables the routing query to prefer links which are closer to the target of the shortest path search.
Prerequisites
For A-Star you need to prepare your network table and add latitute/longitude columns (x1, y1 and x2, y2) and calculate their values.
ALTER TABLE ways ADD COLUMN x1 double precision;
ALTER TABLE ways ADD COLUMN y1 double precision;
ALTER TABLE ways ADD COLUMN x2 double precision;
ALTER TABLE ways ADD COLUMN y2 double precision;
UPDATE ways SET x1 = ST_x(ST_PointN(the_geom, 1));
UPDATE ways SET y1 = ST_y(ST_PointN(the_geom, 1));
UPDATE ways SET x2 = ST_x(ST_PointN(the_geom, ST_NumPoints(the_geom)));
UPDATE ways SET y2 = ST_y(ST_PointN(the_geom, ST_NumPoints(the_geom)));
Note
- A bug in a previous version of PostGIS didn’t allow the use of ST_startpoint or ST_endpoint.
- From PostGIS 2.x ST_startpoint and ST_endpoint are only valid for LINESTRING geometry type and will fail with MULTILINESTING.
Therefor a slightly more difficult looking query is used. If the network data really contains multi-geomtery linestrings the query might give the wrong start and end point. But in general data has been imported as MULTILINESTING even if it only contains LINESTRING geometries.
Description
Shortest Path A-Star function is very similar to the Dijkstra function, though it prefers links that are close to the target of the search. The heuristics of this search are predefined, so you need to recompile pgRouting if you want to make changes to the heuristic function itself.
Returns a set of pgr_costResult (seq, id1, id2, cost) rows, that make up a path.
pgr_costResult[] pgr_astar(sql text, source integer, target integer, directed boolean, has_rcost boolean);
Parameters
| sql: | a SQL query, which should return a set of rows with the following columns: SELECT id, source, target, cost, x1, y1, x2, y2 [,reverse_cost] FROM edge_table
|
||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| source: | int4 id of the start point |
||||||||||||||||||
| target: | int4 id of the end point |
||||||||||||||||||
| directed: | true if the graph is directed |
||||||||||||||||||
| has_rcost: | if true, the reverse_cost column of the SQL generated set of rows will be used for the cost of the traversal of the edge in the opposite direction. |
Returns set of pgr_costResult:
| seq: | row sequence |
|---|---|
| id1: | node ID |
| id2: | edge ID (-1 for the last row) |
| cost: | cost to traverse from id1 using id2 |
Example query
SELECT seq, id1 AS node, id2 AS edge, cost FROM pgr_astar('
SELECT gid AS id,
source::integer,
target::integer,
length::double precision AS cost,
x1, y1, x2, y2
FROM ways',
30, 60, false, false);
Query result
seq | node | edge | cost
-----+------+------+---------------------
0 | 30 | 53 | 0.0591267653820616
1 | 44 | 52 | 0.0665408320949312
2 | 14 | 15 | 0.0809556879332114
...
6 | 10 | 6869 | 0.0164274192597773
7 | 59 | 72 | 0.0109385169537801
8 | 60 | -1 | 0
(9 rows)
Note
- The result of Dijkstra and A-Star are the same, which should be the case.
- A-Star is supposed to be faster than Dijkstra algorithm as the network size is getting larger. But in case of pgRouting the algorithm speed advantage does not matter really compared the time required to select the network data and build the graph.
5.3. Multiple Shortest Paths with kDijkstra¶
The kDijkstra functions are very similar to the Dijkstra function but they allow to set multiple destinations with a single function call.
Prerequisites
kDijkstra doesn’t require additional attributes to Dijkstra algorithm.
Description
If the main goal is to calculate the total cost, for example to calculate multiple routes for a distance matrix, then pgr_kdijkstraCost returns a more compact result. In case the paths are important pgr_kdijkstraPath function returns a result similar to A* or Dijkstra for each destination.
Both functions return a set of pgr_costResult (seq, id1, id2, cost) rows, that summarize the path cost or return the paths.
pgr_costResult[] pgr_kdijkstraCost(text sql, integer source,
integer[] targets, boolean directed, boolean has_rcost);
pgr_costResult[] pgr_kdijkstraPath(text sql, integer source,
integer[] targets, boolean directed, boolean has_rcost);
Parameters
| sql: | a SQL query, which should return a set of rows with the following columns: SELECT id, source, target, cost [,reverse_cost] FROM edge_table
|
||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| source: | int4 id of the start point |
||||||||||
| targets: | int4[] an array of ids of the end points |
||||||||||
| directed: | true if the graph is directed |
||||||||||
| has_rcost: | if true, the reverse_cost column of the SQL generated set of rows will be used for the cost of the traversal of the edge in the opposite direction. |
pgr_kdijkstraCost returns set of pgr_costResult:
| seq: | row sequence |
|---|---|
| id1: | path vertex source id (this will always be source start point in the query). |
| id2: | path vertex target id |
| cost: | cost to traverse the path from id1 to id2. Cost will be -1.0 if there is no path to that target vertex id. |
pgr_kdijkstraPath returns set of pgr_costResult:
| seq: | row sequence |
|---|---|
| id1: | path vertex target id (identifies the target path). |
| id2: | path edge id |
| cost: | cost to traverse this edge or -1.0 if there is no path to this target |
Example query pgr_kdijkstraCost
SELECT seq, id1 AS source, id2 AS target, cost FROM pgr_kdijkstraCost('
SELECT gid AS id,
source::integer,
target::integer,
length::double precision AS cost
FROM ways',
10, array[60,70,80], false, false);
Query result
seq | source | target | cost
-----+--------+--------+------------------
0 | 10 | 60 | 13.4770181770774
1 | 10 | 70 | 16.9231630493294
2 | 10 | 80 | 17.7035050077573
(3 rows)
Example query pgr_kdijkstraPath
SELECT seq, id1 AS path, id2 AS edge, cost FROM pgr_kdijkstraPath('
SELECT gid AS id,
source::integer,
target::integer,
length::double precision AS cost
FROM ways',
10, array[60,70,80], false, false);
Query result
seq | path | edge | cost
-----+------+------+---------------------
0 | 60 | 3163 | 0.427103399132954
1 | 60 | 2098 | 0.441091435851107
...
40 | 60 | 56 | 0.0452819891352444
41 | 70 | 3163 | 0.427103399132954
42 | 70 | 2098 | 0.441091435851107
...
147 | 80 | 226 | 0.0730263299529259
148 | 80 | 227 | 0.0741906229622583
(149 rows)
There are many other functions available with the new pgRouting 2.0 release, but most of them work in a similar way, and it would take too much time to mention them all in this workshop. For the complete list of pgRouting functions see the API documentation: http://docs.pgrouting.org/
Table Of Contents
Previous topic
Next topic
License
This work is licensed under a Creative Commons Attribution-Share Alike 3.0 License.
